Project 4
Disclaimer
Please DO NOT distribute project material or solutions online (e.g. public GitHub repositories). We take violations of the honor code very seriously.
Overview
For this assignment, you will now control your robot to reach a given point in space through inverse kinematics for position control of the robot endeffector. Inverse kinematics will be implemented through gradient descent optimization with both the Jacobian Transpose and Jacobian Pseudoinverse methods, although only one will be invoked at run-time.
Manipulator Jacobian in
kineval/kineval_inverse_kinematics.jsGradient descent with Jacobian transpose in
kineval/kineval_inverse_kinematics.jsJacobian pseudoinverse in
kineval/kineval_matrix.js(pseudoinverse function) andkineval/kineval_inverse_kinematics.js(use in gradient descent)
Instructions
- Start with your solutions to project 3
- Solutions to project 3 will be released on 02/18/2023 (Sun), 3 days after project 3 is due. You can also use the released solution as your starting point.
Matrix pseudoinverse function in
kineval/kineval_matrix.js.- You will need to implement one additional matrix helper function in
kineval/kineval_matrix.jsfor this assignment:matrix_pseudoinverse. This method will be necessary for the pseudoinverse version of gradient descent (see below). For this helper function, you are allowed to use a library function for matrix inversion, which can be invoked by using the provided routinenumeric.inv(mat), available throughnumericjs.
- You will need to implement one additional matrix helper function in
Core IK function in
kineval/kineval_inverse_kinematics.jsArguments
endeffector_target_world: an object expressing the endeffector target in the world frame; it has two fields,endeffector_target_world.position, the target endeffector position (as a 3D homogeneous vector), andendeffector_target_world.orientation, the target endeffector orientation (as Euler angles)endeffector_joint: the name of the joint directly connected to the endeffectorendeffector_position_local: the location of the endeffector in the local joint frame
Expected Behavior
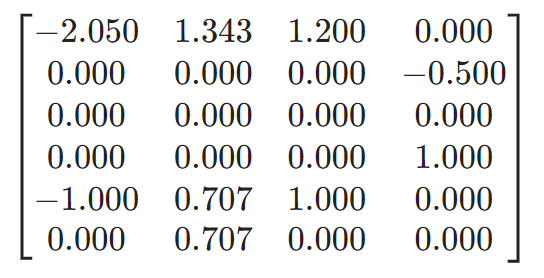
kineval.iterateIK()should compute controls for each joint. Upon update of the joints, these controls will move the configuration and endeffector of the robot closer to the target.- Jacobian The columns of the jacobian should correspond to the sequence of joints from the robot base link to the endeffector joint, excluding any fixed joints. In other words, the columns must be ordered from the base to the end effector. For your reference, the jacobian for the base robot/environment on the first iteration is:
- Position vs. Position + Orientation The default IK behavior will be position-only endeffector control. Both endeffector position and orientation should be controlled when the boolean parameter
kineval.params.ik_orientation_includedis set to true, which can be done through the user interface (Inverse Kinematics->ik_orientation_included).
- Euler Angle Conversion In order to handle the orientation of the endeffector in your IK implementation, you will need to calculate the orientation part of the error term, which will require you to implement a conversion from a rotation matrix to Euler angles. Here is a great reference for converting the matrix to euler angles while avoiding gimbal lock.
Global Parameters
kineval.iterateIK()should also respect global parameters for doing transpose vs. pseudoinverse on the jacobian (through boolean parameterkineval.params.ik_pseudoinverse) and step length of the IK iteration (through real-valued parameterkineval.params.ik_steplength). Note that these parameters can be changed through the user interface (under Inverse Kinematics). KinEval also maintains the current endeffector target information in thekineval.params.ik_targetparameter.
Usage IK iterations can be invoked through the user interface (Inverse Kinematics->persist_ik) or by holding down the ‘p’ key. Further, the ‘r’/’f’ keys will move the target location up/down. You can also move the robot relative to the target using the robot base controls. When performing IK iterations, the endeffector and its target pose will be rendered as cube geometries in blue and green, respectively.
Global Variables you will need to set three global variables in
kineval.iterateIK():robot.dx,robot.jacobian, androbot.dq. There is a comment inkineval.iterateIK()ofkineval/kineval_inverse_kinematics.jsthat specifies what each of these variables should hold. Please note thatrobot.dxandrobot.jacobianshould both have six rows, even if you are doing position-only IK.Random Trials You can also try running the random time trial to test the performance of your IK algorithm. This will not be part of the autograder/grading, but may help you debug. In general, IK with transpose does well when the arm is stretched far out, while IK with pseudoinverse does well when the arm is close to the body.
- Submit your
kineval/kineval_inverse_kinematics.jsand `kineval/kineval_matrix.js,- The autograder is available at https://cse-ag-csci5551.cse.umn.edu/
Deadline
This project is due on Wednesday, February 28th at 11:59pm CT.
Grading
The project is worth a total of 10 points.